Senior Projects > BiRTH: Biomimetic Robotic Teleoperated Haptics
This was an inter-departmental project by Abrar Rahman (Electrical Engineering) and Kerestell Smith (Mechanical Engineering). The project involved the creation of a robotic finger that mimics the actions of a human finger; additionally, force-feeback allows the human finger to experience the forces felt by the robotic finger. Abrar and Kerestell implemented a one-degree of freedom model for their Senior Project, and continued to work after that on a four-degree of freedom model. This project tied for second place at the 2012 IEEE Regional Student Paper Contest and it came in third place at the 2012 RIT IEEE Student Design Contest.
Abstract from Abrar's and Kerestell's final paper:
In robotic control applications, the robot operator needs to practice manipulating robotic appendages that are an abstract analogue of a human body part, such as a claw in place of a hand. This paper proposes a solution to remove the learning period to master the robot and to improve on fine control. This system is intuitive because it operates a robotic hand by mimicking the movements of a human hand. The fine control comes from position based force-feedback implemented using artificial tendons, similar to those of a human hand. To date we have implemented a prototype for a single finger with one-degree of freedom and have the design for scaling up to four-degrees of freedom.
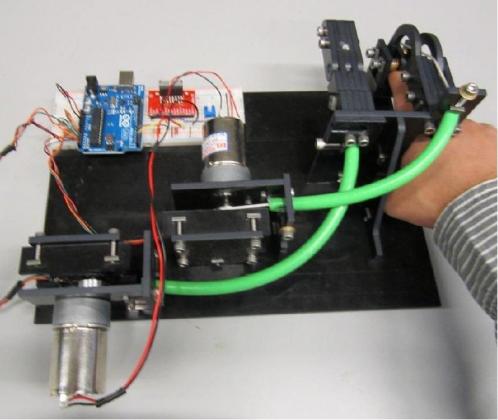
Below you see an image of their one-degree of freedom implementation:
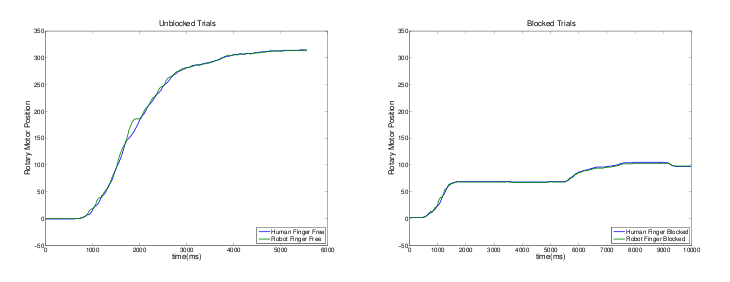
The graphs below demonstrates the accuracy with which the robotic finger mimics the human finger for two experiments. The curves in the left graph represent a freely moving finger bending downward. The curves in the right graph represent a finger bending downward, but an obstruction blocks the robotic finger, and the force-feedback also prevents the human finger from moving further. As you can see, the movements of the human and robotic finger match each other with a high level of accuracy: