
Autonomy Lab > Integrated Sensor Platform
Projects Overview
 Real-Time Estimation of Transit Origin-Destination Patterns and Delays Using Low Cost Ubiquitous Advanced Technologies
Real-Time Estimation of Transit Origin-Destination Patterns and Delays Using Low Cost Ubiquitous Advanced TechnologiesFunded by: University Transportation Research Center (UTRC). Collaboration with: New York University Polytechnic (NYU Poly) & Rutgers
Spectral-based Controllability-preserving Pedestrian Evacuation Network Synthesis Using Multilayered Estimation Models in Real-Time
Funded by: University Transportation Research Center (UTRC). Collaboration with: Center for Urban Science & Progress (CUSP) at NYU Poly
System Architecture Overview

Objective & Challenges
Utilizing Bluetooth and WiFi technology to:
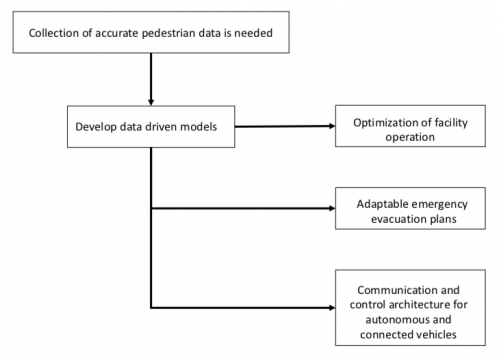
- Establish a general framework through data-driven pedestrian modeling within transit stationsObtain time-dependent origin-destination (OD) demands
- Estimate station wait-times of transit bus and subway users
- Estimate average hourly, daily, weekly volume, and delays
Advantages
- Cost-effective Portable
- Easy to deploy Scalable
- Rich data and adequate sample size
Challenges
- Lack of sensor infrastructure
- Unrestricted movement of pedestrians
- Filtering, sensor placement, and sensor features algorithms are location and pedestrian nature dependent and not so easy to develop a one fits all solution