
Autonomy Lab > The Cooper Mapper
Autonomous Driving Platform
The Cooper Mapper is a mapping robot focusing on usingsensor fusion of LiDAR and camera to create high definition 2D & 3D map of the surroundings. This project will focuses on improving the ability for robots to navigate unknown environment autonomously. The Cooper Mapper enables development of planning and smooth navigation algorithm in an indoor, and a combined indoor/outdoor environment. Having both one-line LiDAR and sixteen-line LiDAR ensures the robot uses what is most efficient for the current application. Multiple Cooper Mappers provide an easily accessible testbed for the development of connected transportation system stack. By exploiting the synergy between autonomous and connected vehicles, the future of transportation will be fast, lightweight, and economical.
Research Topics
- Autonomous sampling-based planning algorithm in unknown environment.
- Autonomous probabilistic roadmap algorithm in unknown environment.
- Ubiquitous Indoor/Outdoor perception and mapping techniques.
- Multirobot transportation system for future CAV (connected autonomous vehicles).
LATEST NEWS
"The Cooper Mapper-Autonomous Driving Platform" WON the COOPER UNION GRANT, April 17, 2019. We are grateful for this support and we look forward to continuing our work on these projects with the Cooper’s Strategic Priorities in mind.
CONGRATULATIONS to the Cooper Mapper Team: Zhekai Jin, Yifei shao, and Minjoon So for winning 1st place in the IEEE Region I, Student Paper Competition, A Multi-sensor Data Fusion Approach for Simultaneous Localization and Mapping, March 10, 2019.
NVIDIA DRIVE PX 2 Grant Approved, Nov 13, 2018. This will be used to develop and implement our algorithms that fuse visual and Lidar data for accurate localization using a 16 scan-line Lidar and multiple cameras.
Robot Research Platform Development Steps
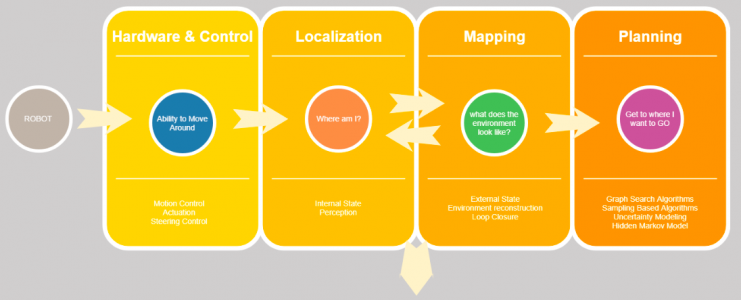
- Making a structurally robust robot with predictable and easily controllable dynamics.
- Implement Hardware level control of the robot and communication channel so the robot can be tele-operated.
- Implement SLAM algorithm with tele-operated robot & ensure accurate mapping result with floor plan.
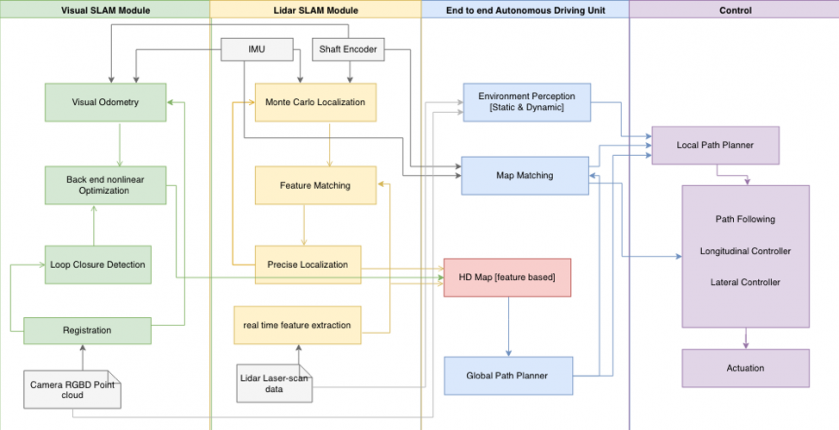
Software Pipeline
Hardware
Sensors
![]()
Computation

Actuation
![]()